
Essay 14 simulates a dual-control slug that avoids obstacles and halts for food. The slug’s obstacle avoidance uses a Braitenberg vehicle circuit [Braitenberg 1986], and food halting uses primitive zooplankton behavior [Smith 2015]. The animal is called a slug because its base motion is a mucociliary sole, which moves without needing neural control. When the slug’s right sensor detects a wall, the left muscle contracts, turning it to the left. When the slug’s left sensor detects a wall, the right muscle contracts, turning it to the right. When the slug detects food, it halts briefly. The two control systems are entirely separate.
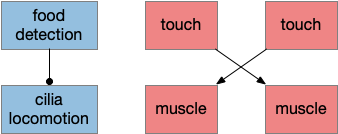
Food halting circuit
The animal pauses when it’s over food, similar to zooplankton behavior over algae or a Precambrian animal over a bacterial mat. Food-halting takes advantage of a refractory period to move slowly instead of halting entirely. A refractory period is a short time after a neuron of cell activates when it can’t fire or act until the period ends, a simple chemical timer.
The basic movement is motivated, meaning the animal moves without needing external motivation. It moves by default and only halts when it detects food. Note, the animal doesn’t move toward food; it only halts when it randomly is above food. The behavior is consuming not approaching.
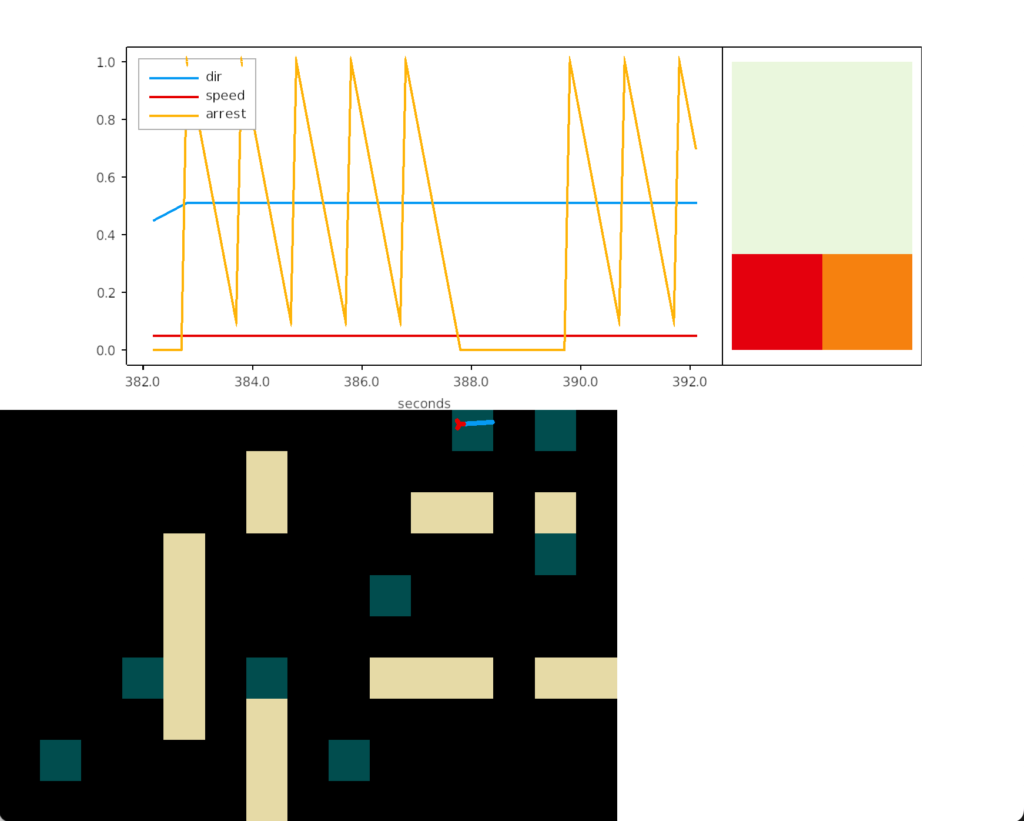
Because the food circuit leans on the refractory pause, its logic is trivial. Internal chemical timers of the cells provide a more sophisticated behavior than the circuit achieves on its own.
fn food_arrest_update(mut body: ResMut<Body>) {
if body.is_sensor_food() {
body.arrest(1.);
}
}Obstacle avoidance
The slug avoids obstacles by turning to the opposite side of the sensor. This navigation does not affect the basic locomotion from mucociliary sole. Instead it turns the entire body to modify locomotion without needing neural interaction.
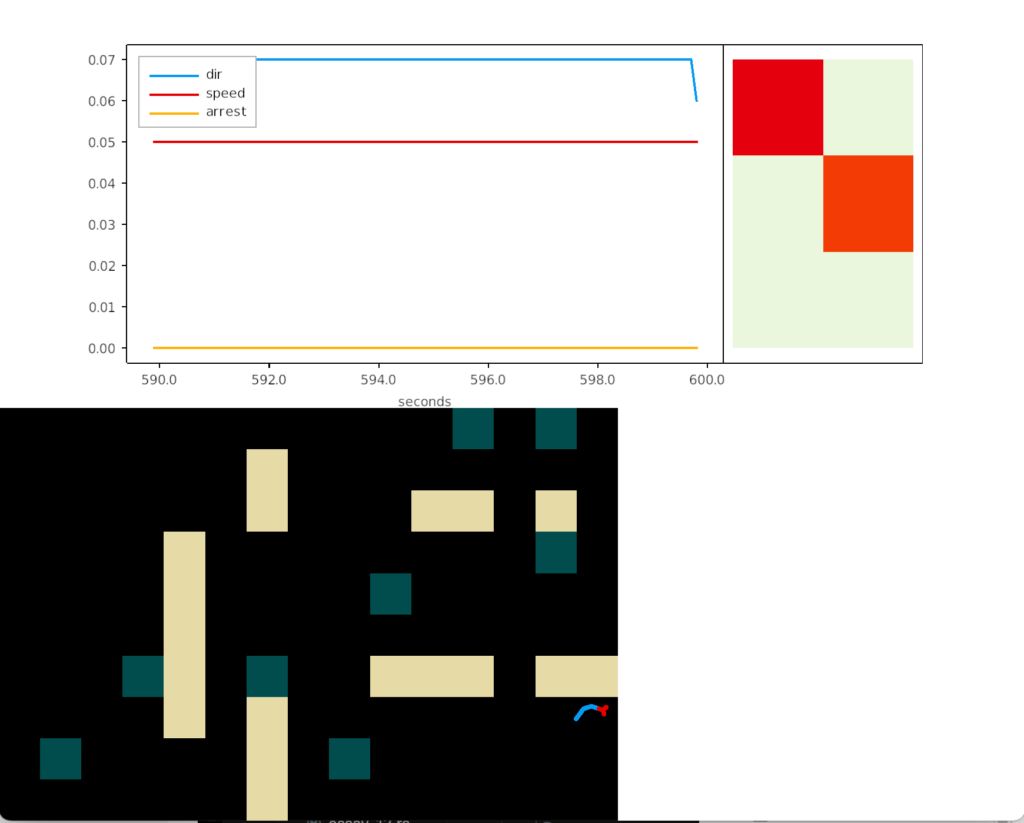
Because both sensors activate when the slug hits an obstacle directly, the system needs to choose one direction. A simple choice prefers one direction for any conflict. In the vertebrates, some areas are asymmetric, such as the habenula. In the lamprey, the habenula is strongly asymmetrical, one side much larger and more sophisticated than the other. The habenula is associated with both motivation values and some navigation for escape, and it’s a primitive area in the midbrain that doesn’t rely on sophisticated cortical learning.
The essay’s code prefers the left sensor to the right one when there’s a conflict.
fn touch_muscle_update(mut body: ResMut<Body>) {
if body.is_sensor_left() {
body.set_muscle_right(1.);
} else if body.is_sensor_right() {
body.set_muscle_left(1.);
}
}Model meta discussion
With such a simple model, I think it’s important to ask what value the model provides. The code and logic itself is trivial. I think the model’s value is in focus, like a diagram for a model, showing what’s strictly necessary and exposing conflicts like the dual sensor when hitting a wall straight on.
The dual control system is a key concept. The [Arendt 2015] paper treats chemosensors and mechanosensors as fundamentally distinct cellular systems. The essay’s food halting system corresponds to the chemosensory cell types, and its obstacle avoidance system corresponds to the mechanosensory and muscle cells types of the skin.
References
Arendt D, Benito-Gutierrez E, Brunet T, Marlow H. Gastric pouches and the mucociliary sole: setting the stage for nervous system evolution. Philos Trans R Soc Lond B Biol Sci. 2015 Dec 19;370(1684):20150286. doi: 10.1098/rstb.2015.0286. PMID: 26554050; PMCID: PMC4650134.
Braitenberg, V. (1984). Vehicles: Experiments in synthetic psychology. Cambridge, MA: MIT Press. “Vehicles – the MIT Press”
Brooks, R.A. (1991), ‘Intelligence without Representation’, Artificial Intelligence 47, pp. 139-159.
Smith CL, Pivovarova N, Reese TS. Coordinated Feeding Behavior in Trichoplax, an Animal without Synapses. PLoS One. 2015 Sep 2;10(9):e0136098. doi: 10.1371/journal.pone.0136098. PMID: 26333190; PMCID: PMC4558020.