
The model required a major refactoring to properly simulate the essay.
HindMotor
HindMotor includes the motor command areas in the hind-brain with locomotion and eating as separate modules. Locomotion models B.rs (reticulospinal motor command neurons) and B.mdd (medulla reticular neurons). Eating models parts of B.pb (parabrachial nucleus), B.nts (nucleus of the solitary tract) and B.mdd. The locomotion and eating modules do not coordinate at the hind-brain level for this model.
In this essay, HindMotor controls the random search, modulated by upstream request, and also manages action bouts. One an action starts, it continues until complete, which generally requires several simulation ticks. Because the essay model is real-time, not turn-based, actions require several simulation ticks to complete.
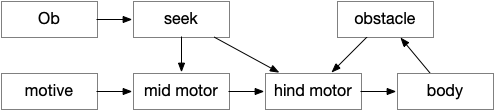
HindMotor locomotion commands are split between directional hints and forward movement hints, following a similar division in vertebrates. Turn modulation comes from target seeking and obstacle avoidance, either encouraging or inhibiting left vs right turns. Forward movement modulation comes from the motive core, specifically selecting between a roaming search or an area-restricted dwelling search.
MidMotor
MidMotor coordinates actions that HindMotor implements. MidMotor with sustains actions across action bouts, and manages the transition between action bouts. Because ongoing movement needs to stop before eating, MidMotor pauses eating until the animal stops.
MidMotor represents Ppt (predunculopontine nucleus), H.stn (subthalamic nucleus), OT.d (deep optic tectum), MLR (midbrain locomotor region), and T.pf (parafascicular nucleus). For this essay, Ppt and H.stn work together as a single module to sustain actions and pause upcoming actions until currently-active actions are complete.
Seek
The essay Seek is directional movement toward a specific target, the same idea as taxis (but avoiding Greek). Seek is only active with a specific directional cue, here an olfactory gradient.
Seek models Hb.m (medial habenula) and M.ip (interpeduncular nucleus), where M.ip is models as a gradient seek module like the Drosophila fan-shaped body.
CoreMotive
CoreMotive simulates the motivational core, which is primarily peptide based. In this essay, the neural areas include H.l (lateral hypothalamus), V.dr (dorsal raphe), and B.pb (parabrachial nucleus). H.l is strongly associated with all aspects of feeding and is the driving controller. V.dr expresses the dwell state, which restricts search to a small area once the animal has found food. B.pb manages eating, taste, and physical alarms that might interrupt eating.
Motive neuropeptides
Because the motive core is more broadcast neuropeptide-based than a connective circuit, the simulation includes broadcast neuropeptides as primitive motives. In this essay, the key motives are Roam (motivation to search for food, orexin), Dwell (area restricted search, serotonin), Seek (tracking a target, dopamine) and Sated (antagonizing all food search, GLP-1).
Each motive is a DecayValue, which represents a slow leaky integrator, where the decay time can be tens of seconds or longer, because neuropeptide timing can be long. To a Dwell signal might last for 20 seconds or more without requiring recurrent neural behavior to maintain the state. Since these Motives are broadcast, they can modulate any module with requiring a direct connection.
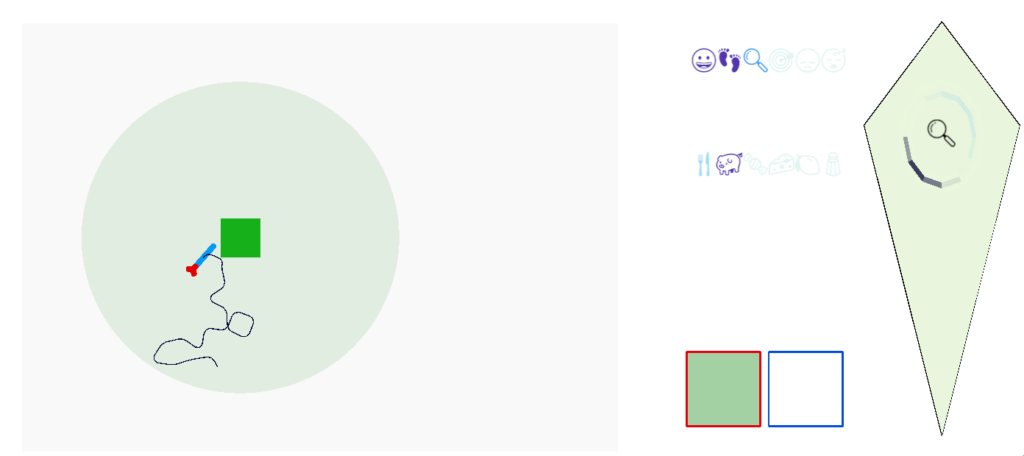
The screenshot above shows several motives after the animal eats, where emojis represent the active motives. The animal is sated (pid), eating is fading (faded fork and knife), search is in dwell (magnifying glass) because the animal has just eaten, and it’s still roaming (footprints).